


Development and Application of High-Throughput Bio-Micromanipulation Robotic Systems
Xu Qing Song
University of Macau
Automated bio-micromanipulation robotic systems are crucial devices to enable guaranteed safety and accuracy of advanced robotic manipulation in biological field. It is challenging to achieve automated high-throughput micromanipulation of live biological samples such as zebrafish larvae with high success rate. Prof. Qingsong Xu has made international pioneering works in the fields of micro/nano-robotics, automated biological manipulation, and bio-MEMS systems. The project innovatively designed and invented compliant micromanipulators with microforce and haptics feedback. For the first time, novel high-throughput bio-micromanipulation robotic systems have been developed for both zebrafish larvae and cells with higher speed, higher survival rate, and higher consistency in comparison with existing approaches. The advantages of the invented innovative technologies lie in ultra-high sensitivity and cyclic stability, which can lead to cost reduction of emerging product, resulting in four relevant patents. The project results exhibited significant impacts on academia and industry, and received six awards. The impacted outcomes have been highly recognized by world renowned experts and favored by investors of robotics and biotech companies in the field.
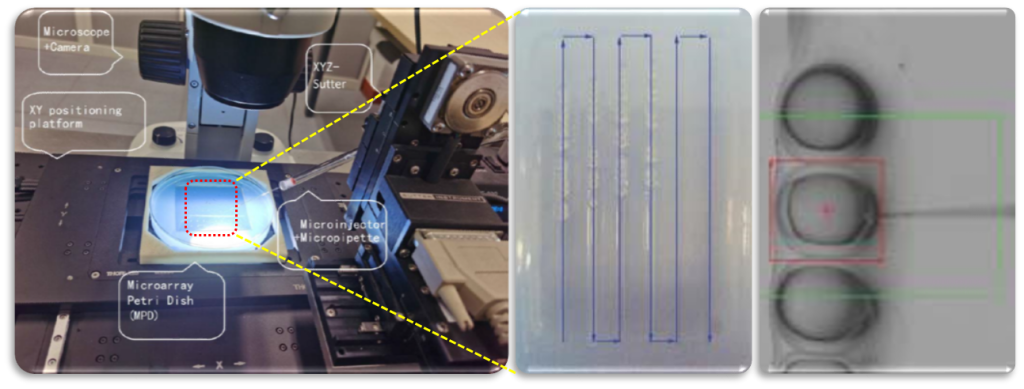
Fig 1 Prototype of high-throughput robotic microinjection system for zebrafish embryos.
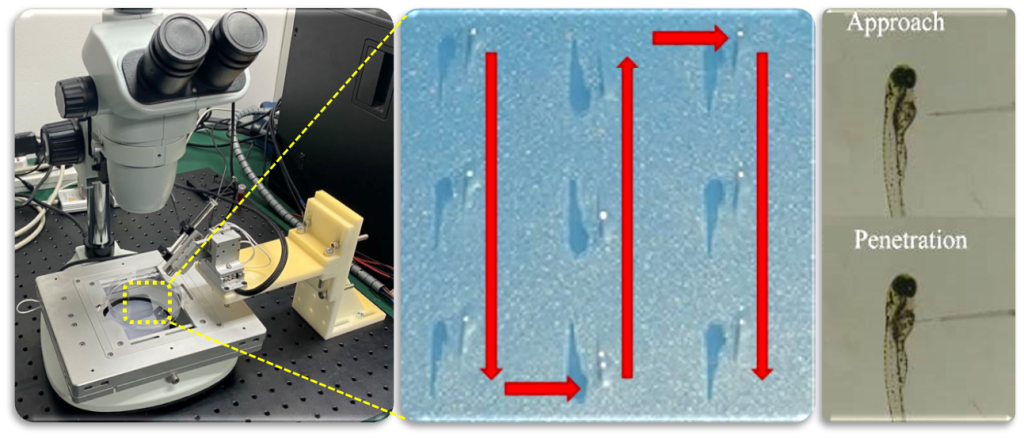
Fig 2 Prototype of high-throughput robotic microinjection system for zebrafish larvae.