



柔性精密操控機器人設計關鍵技術與應用
徐青松、葛偉
澳門大學
柔性機器人具有靈活的結構或靈巧的操作,是領域內主流和前沿發展方向。研發高性能精密操控的柔性機器人需要克服機構設計和控制設計中一系列挑戰。該項目利用斑馬魚作為模型,創新發明了柔性末端執行器和柔性微操作器,實現了高精度、高安全性、高保真度的力交互和操控。研製出的觸覺回饋機器人系統,將柔性微操作機器人高精度與人類高智慧相結合,首次實現了對斑馬魚卵和幼魚的混合注射,大大提高了注射效率。研製出新型柔性磁性微型機器人,可在生物流體中靈活部署和導航,適用於靶向藥物輸送和精準醫療。該技術發明可大大降低產品成本,拓寬應用性,在業界和學術界產生了廣泛的影響,並獲得六個獎項,受到國內外專家的高度認可和評價。
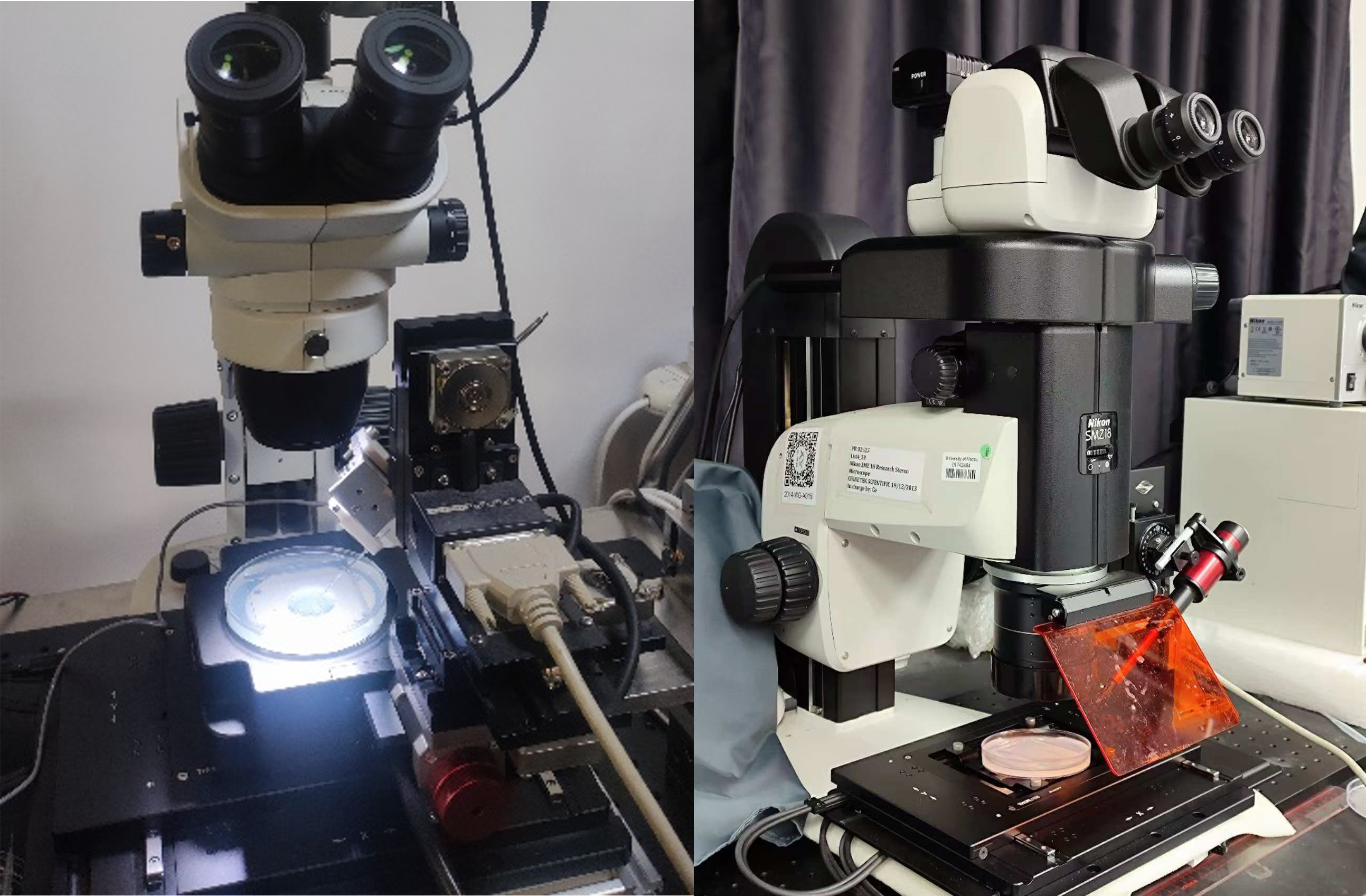
圖1 用於斑馬魚卵和幼魚混合注射的柔性微操作機器人系統

圖2 用於生物流體中精確導航和部署的柔性磁控微型機器人