



Key Technologies and Applications of Flexible Precision-Manipulation Robot Design
Xu Qing Song, Ge Wei
University of Macau
Flexible robots have flexible structures or dexterous operations and are the mainstream and cutting-edge development direction in the robotics field. The development of flexible robots with high performance and high precision requires overcoming a series of challenges in mechanism design and control design. Using zebrafish as the model, this project innovatively invented flexible end-effectors and flexible micromanipulators, achieving high-precision, high-safety, and high-fidelity force interaction and control. A haptic feedback robotic system for zebrafish injection has been developed, which combines the high precision of a flexible micromanipulation robot with the high intelligence of humans. It has achieved mixed injection of zebrafish eggs and larvae for the first time, greatly improving the injection efficiency. A new type of flexible magnetic microrobot has been developed that can flexibly deploy and navigate in biological fluids to achieve targeted drug delivery and precision medicine. This technological invention can greatly reduce product costs and broaden applicability. It has made a wide impact in industry and academia. It has won six awards and is highly recognized and evaluated by experts at home and abroad.
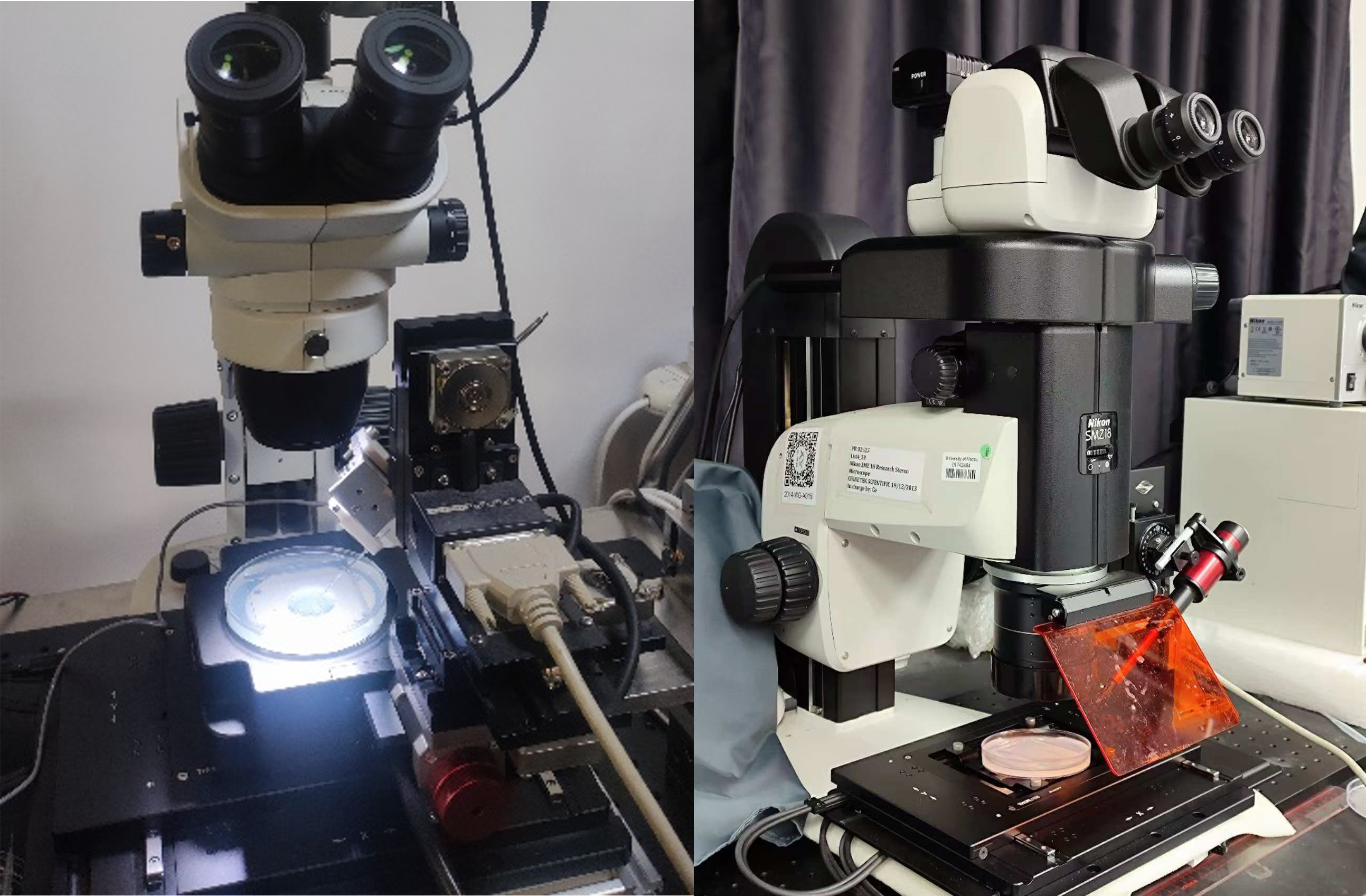
Fig 1 Flexible micromanipulation robotic system for mixed injection of zebrafish eggs and larvae.

Fig 2 Flexible magnetic microrobot for precision navigation and deployment in biofluids.